Docket #: S06-091
StickyBot - Climbing with dry adhesives
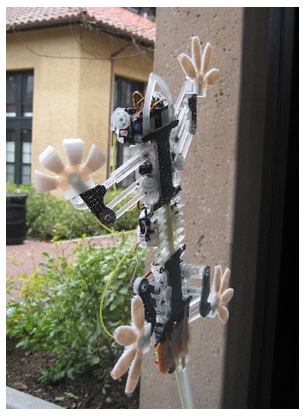
Stanford researchers have patented a bio-inspired device designed to scale smooth vertical surfaces using anisotropic frictional materials. The device draws its inspiration from geckos and other climbing lizards and employs similar compliance and force control strategies to climb (or hang onto) smooth vertical surfaces including glass, tile and plastic panels. This invention has been extensively tested on the gecko mimicking robot 'StickyBot.' It can be used on climbing robots or in any other application requiring a temporary or directional adhesive – such as in devices currently employing suction cups.
Stage of Research:
Current protoype is the StickyBot III as shown on the project website
Applications
- Anything requiring temporary, directional, and/or dry adhesives - such as items currently using suction cups
- Climbing robots (particularly those designed for smooth, vertical or near vertical surfaces)
- Robots that need to negotiate tricky surfaces, such as pipes/pipelines, structural columns/poles, structural members, etc.
Advantages
- Adheres quickly and with high force in one direction, releases quickly and smoothly when appropriately pulled in the other
- Does not require high forces (especially normal forces) to achieve good adhesion or set the adhesive material
- Dry, temporary adhesive that is durable and can be used repeatedly
- Leaves no residue and is easy to use in adhesive applications
- Permits previously unattainable robotic mobility
- Can miniaturize the features of the material to less than 1 micrometer to get higher efficiencies and/or smaller devices
Publications
- Santos, D., Kim, S., Spenko, M., Parness, A., Cutkosky, M.R., "Directional Adhesive Structures for Controlled Climbing on Smooth Vertical Surfaces" ICRA Rome, Italy, 10-14 April 2007, 1262-1267
- The following paper was awarded the IEEE ICRA07 Best Student Paper award: Sangbae Kim; Spenko, M.; Trujillo, S.; Heyneman, B.; Mattoli, V.; Cutkosky, M.R. "Whole body adhesion: hierarchical, directional and distributed control of adhesive forces for a climbing robot" 2007 IEEE International Conference on Robotics and Automation. 10-14 April 2007 Page(s):1268 - 1273
Patents
- Published Application: 20070289786
- Published Application: WO2008051289
- Issued: 7,762,362 (USA)
Similar Technologies
-
Manufacturing Method for Synthetic Gecko-Inspired Adhesives S10-333Manufacturing Method for Synthetic Gecko-Inspired Adhesives
-
Tactile Gesture Interpretation for Safe Human-Robot Handovers S20-470Tactile Gesture Interpretation for Safe Human-Robot Handovers
-
Compact, Parallel, High-Fidelity 7-DOF Haptic Device S19-193Compact, Parallel, High-Fidelity 7-DOF Haptic Device