Docket #: S08-080
Adaptive Steering Control
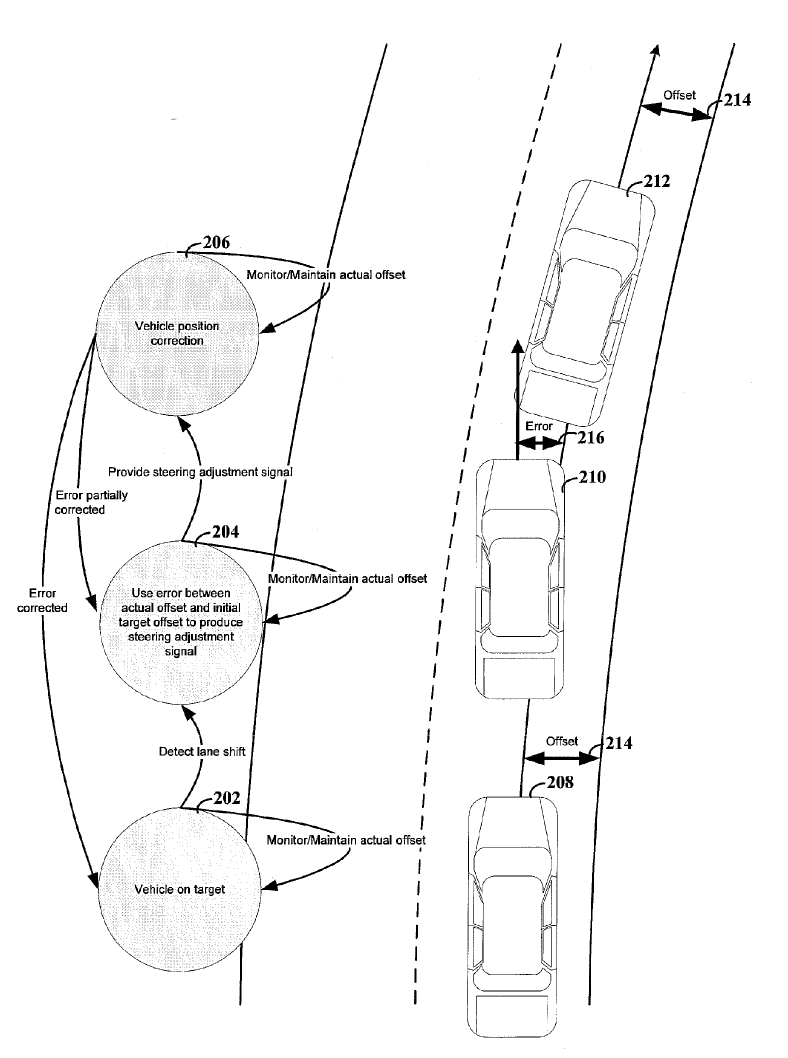
Stanford researchers have patented a hardware and software system designed for automated assisted steering that combines automated and human vehicle control within driving lanes. The driver maintains control while the adaptive steering system assists by determining road curvature and an apparatus for trimming the steering angle of the vehicle in response to road curvature.
Applications
- Vehicle control - to facilitate lane keeping in a car
- Steering control - to enhance safety while driving
Advantages
- Increases safety
- Partial autonomy - Driver can implement discrete choices (such as lane changes or turning at an intersection), but the automated system relieves the driver of the burden of constantly adjusting steering in response to road curvature.
Publications
- Thrun, Sebastian, and Jesse S. Levinson. "Systems, methods and devices for adaptive steering control of automotive vehicles." U.S. Patent 8,392,064, issued March 5, 2013.
Patents
- Published Application: 20090299573
- Published Application: WO2009151781
- Issued: 8,392,064 (USA)
Similar Technologies
-
Anticipatory Steering Wheel Movement for Automated Vehicles S16-370Anticipatory Steering Wheel Movement for Automated Vehicles
-
Spatiotemporal Relationship Reasoning for Pedestrian Intent Prediction S19-275Spatiotemporal Relationship Reasoning for Pedestrian Intent Prediction
-
Navigational Video and Virtual Tours S07-033Navigational Video and Virtual Tours