Docket #: S19-431
Device to retract soft growing robots
Stanford researchers at the Okamura Lab have prototyped a new retraction device that can reverse growth of a soft growing robot without undesired buckling. This device extends the usability of pneumatically everting soft growing robots described in earlier Stanford docket S15-383. This device enables the robot to retrace its steps after growing in free space, as well as to retract without applying undesired force to the environment in confined space. Applications include navigation, exploration, and manipulation tasks in varied industries such as oil and gas and nuclear powerplant and aircraft/military inspection.
Related Technology:
Stanford docket S15-383 "Soft robotic device capable of growth"
Stanford News, July 19, 2017 "Stanford researchers develop a new type of soft, growing robot"
Video
Video credit: Okamura Lab
Figure
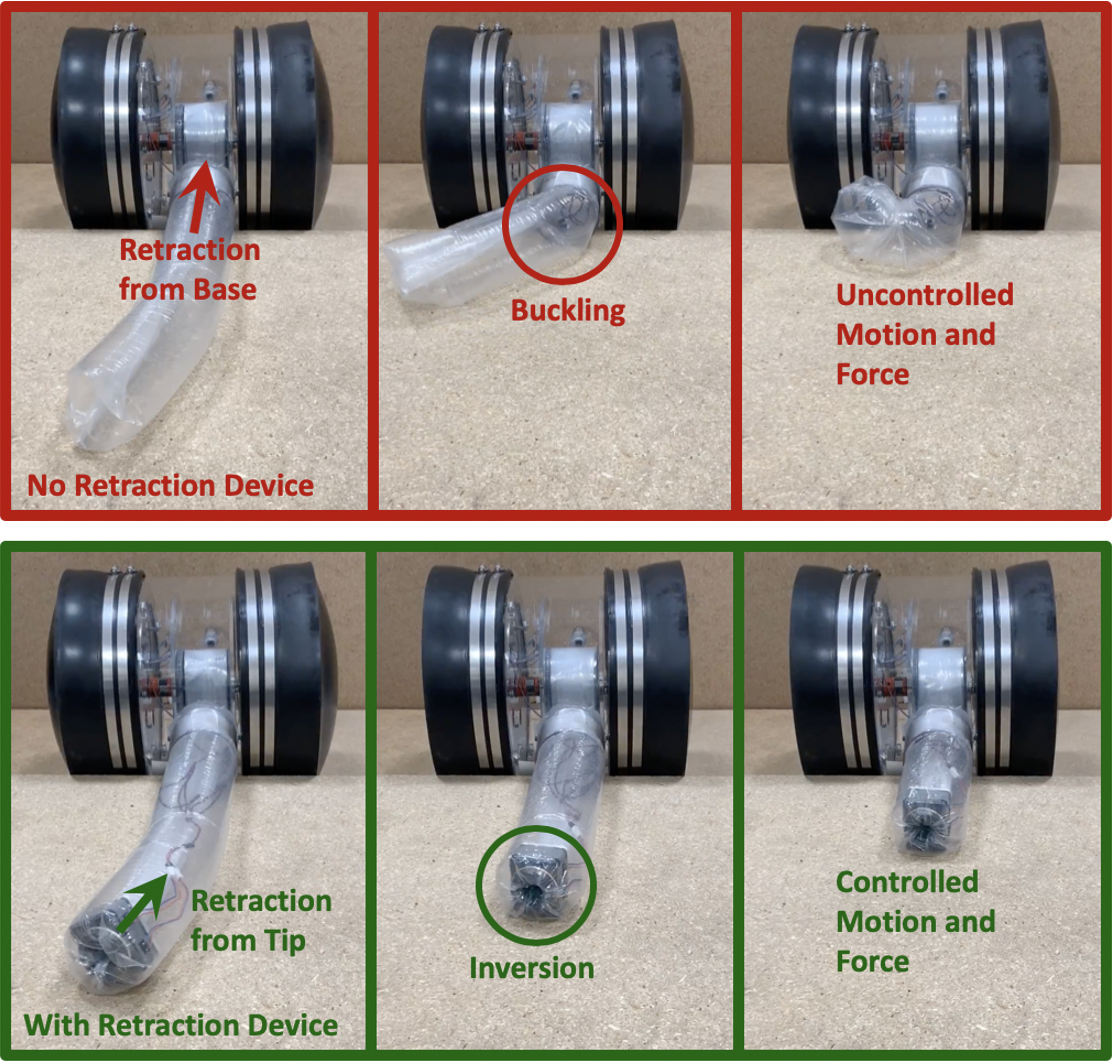
Figure description - Device allows controlled tip motion and force applied to the environment for soft growing robots during retraction. Figure credit: Okamura Lab
Stage of Development
Applications
- Navigation, exploration, and manipulation tasks
- Oil and Gas inspection
- Nuclear decommissioning and plant inspection
- Aircraft/Military inspection
- Other exploration and inspection – e.g. retrieving samples or delivering payload
Advantages
- Novel design:
- Retracts the robot without buckling, enabling control of the robot tip position and the force applied on the environment during retraction as well as growth
- Provides a mounting point for sensors and tools at the robot tip
- New tasks performed:
- Exploring different branches of a forking path
- Reversing growth (retracting) while applying minimal force on the environment
- Grasping and bringing back environment samples to the base
- Flexible length of soft robot: These robots can lengthen from a fixed base to arbitrary lengths, limited only by the amount of material that can be stored in the base
Publications
- Coad, Margaret M., Rachel P. Thomasson, Laura H. Blumenschein, Nathan S. Usevitch, Elliot W. Hawkes, and Allison M. Okamura. "Retraction of soft growing robots without buckling." IEEE Robotics and Automation Letters 5, no. 2 (2020): 2115-2122.
- Jeong, Sang-Goo, Margaret M. Coad, Laura H. Blumenschein, Ming Luo, Usman Mehmood, Ji Hun Kim, Allison M. Okamura, and Jee-Hwan Ryu. "A Tip Mount for Carrying Payloads using Soft Growing Robots." arXiv preprint arXiv:1912.08297 (2019).
Related Links
Patents
- Published Application: WO2021072295
- Published Application: 20220355468
- Issued: 12,337,476 (USA)
Similar Technologies
-
Compact, Parallel, High-Fidelity 7-DOF Haptic Device S19-193Compact, Parallel, High-Fidelity 7-DOF Haptic Device
-
A bio-inspired stretchable membrane-based compliance sensor S19-198A bio-inspired stretchable membrane-based compliance sensor
-
Soft robotic device capable of growth S15-383Soft robotic device capable of growth