Docket #: S23-505
Energy-efficient rotary actuators
Stanford researchers have invented an efficient rotary actuator that recycles elastic energy by engaging and disengaging springs using concentric electroadhesive clutches.
Rotary actuators are used to convert electrical energy into mechanical energy to power a wide range of devices that rely on rotational motion. Conventional electric actuators waste a significant amount of energy as heat during operation. There is a need for a more efficient rotary actuator, especially for battery-powered devices and devices with dynamic control over a wide range of torque and speed.
Researchers at Stanford University have developed an efficient rotary actuator with one or multiple energy-recycling modules connected to a common output shaft. The module includes a frame-anchored spring coupled to two concentric low-power rotary electroadhesive clutches, one linked to the central output shaft and the other to the frame (Figure 1A, B). When activated, each clutch's rotor gets locked to the sleeve (Figure 1C). The clutches are sequentially activated and deactivated, engaging and disengaging the spring, to store and transmit torque to the output shaft. This actuator harnesses the spring's ability to produce static torque with minimal energy loss for energy-efficient actuation.
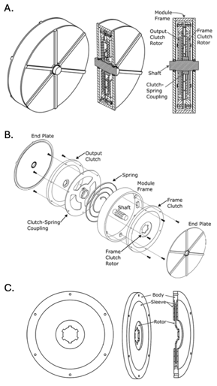
Figure 1. Energy-recycling rotary actuator containing a single energy-recycling module. A) Overview of the actuator. B) Exploded view showing components. C) Rotary electroadhesive clutch.
Stage of Development
Prototype
Applications
- Robotics (ex. Exoskeletons, powered prosthetic devices, legged robots)
- Automotive systems
- Industry machinery
- Consumer electronics
Advantages
- Reduced energy consumption without sacrificing control
- Extended runtime for battery powered devices
- Novel simplified clutch arrangement
- Compact
- Modular capabilities
Publications
- Krimsky, E., & Collins, S. H. (2024). Elastic energy-recycling actuators for efficient robots. Science Robotics, 9(88), eadj7246.
Related Links
Similar Technologies
-
An All-Soft Variable Impedance Actuator Enabled by Embedded Layer Jamming S22-023An All-Soft Variable Impedance Actuator Enabled by Embedded Layer Jamming
-
High Energy Density Shape Memory Polymers Using Strain-Induced Supramolecular Nanostructures S20-319High Energy Density Shape Memory Polymers Using Strain-Induced Supramolecular Nanostructures
-
Designer Piezoelectricity in Graphene S11-288Designer Piezoelectricity in Graphene