Docket #: S24-190
Next-Generation Spacecraft Pose Estimation Dataset (SPEED+)
SPEED+ is an advanced dataset for vision-based spacecraft pose estimation with specific emphasis on evaluating the robustness of Machine Learning (ML) models across the domain gap. It includes images of the Tango spacecraft from the PRISMA mission and features three domains from two sources:
1. Synthetic Domain: Created with Stanford's OpenGL-based Optical Stimulator, it consists of 59,960 labeled synthetic images split 80:20 for training/validation.
2. Hardware-In-the-Loop (HIL) Domains: 1. Generated at SLAB's Testbed for Rendezvous and Optical Navigation (TRON) facility, using lightboxes and sunlamp for realistic illumination. These domains are accompanied with high-accuracy pose labels recovered from the calibrated TRON facility. In practice, they are reserved for testing, reflecting real-world scenarios without pre-labeled target space images.
SPEED+ is publicly available and part of the second international Satellite Pose Estimation Competition (SPEC2021), co-hosted by SLAB and the European Space Agency's Advanced Concepts Team. The applications of autonomous vision-based spaceborne navigation using the SPEED+ dataset are extensive and crucial for various space missions.
Figure -
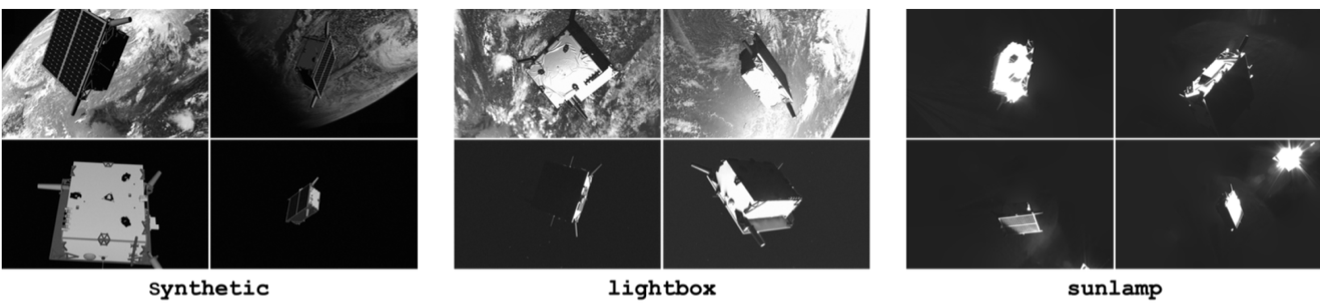
Figure description - Example images from different domains of SPEED+ DOI: 10.1109/AERO53065.2022.9843439
Related Technology Stanford Docket S24-237 "SHIRT: Satellite Hardware-In-the-loop Rendezvous Trajectories Dataset"
The Satellite Hardware-In-the-loop Rendezvous Trajectory (SHIRT) dataset consists of images and pose labels associated with two rendezvous trajectory scenarios (ROE1 and ROE2) in Low Earth Orbit (LEO) created from two different sources. One is the OpenGL-based computer graphics renderer to create the synthetic images, and the other is the Testbed for Rendezvous and Optical Navigation (TRON) facility at the Space Rendezvous Laboratory (SLAB) of Stanford University which captures real images of a satellite mockup model illuminated with the diffuse light boxes to simulate Earth albedo light encountered in LEO.
Applications
- The data set can be used for any space rendezvous applications including but not limited to:
- Space Logistics
- On-Orbit Servicing
- Debris Removal
- Autonomous Rendezvous and Docking
- Planetary Exploration
- Teleoperation and Remote Sensing
Advantages
- Novel - First of its kind
- Open Source
- Domain Gap Bridging
- Enhanced Realism
- Improved Accuracy
- Cost-Effective Development
- Diverse Training Data
- Standardization: SPEED+ serves as a benchmark dataset, promoting standardization in the evaluation of ML models for spaceborne navigation, ensuring consistency and reliability across the field.
Publications
- Park, T. H., Märtens, M., Lecuyer, G., Izzo, D., D'Amico, S. SPEED+: Next-Generation Dataset for Spacecraft Pose Estimation across Domain Gap, 2022 IEEE Aerospace Conference (AERO), 2022, pp. 1-15, doi:10.1109/AERO53065.2022.9843439.
- Park, T. H., Märtens, M., Jawaid, M., Wang, Z., Chen, B., Chin, T.-J., Izzo, D., D'Amico, S. Satellite Pose Estimation Competition 2021: Results and Analyses, Acta Astronautica, 2023, doi:10.1016/j.actaastro.2023.01.002
Related Links
Similar Technologies
-
SHIRT: Satellite Hardware-In-the-loop Rendezvous Trajectories Dataset S24-237SHIRT: Satellite Hardware-In-the-loop Rendezvous Trajectories Dataset
-
Stanford Drone Dataset: Multi-scale, Multi-target social navigation S17-376Stanford Drone Dataset: Multi-scale, Multi-target social navigation
-
End-to-end Semantic Segmentation of 3D Point Clouds by Convolutional Neural Networks, Trilinear interpolation, and Conditional Random Fields S17-380End-to-end Semantic Segmentation of 3D Point Clouds by Convolutional Neural Networks, Trilinear interpolation, and Conditional Random Fields