Docket #: S18-211
Third Arm: Smart, Wearable, Robotic device
Stanford researchers at the Salisbury Robotics Lab have prototyped a wearable, articulated robotic device with patented four-state brake modules that can be attached to a person at the hip or other location to augment human task productivity. This mechanical "third arm" has many uses such as assisting abled users (e.g. holding additional tools to enhance work), helping disabled users (e.g. providing support and lifting objects), and as a haptic interface for interaction with robotics systems and AR/VR experiences. This invention incorporates the latest patented robotic technology with a newly designed fail-safe, 4-state brake mechanism in joints for advanced operations.
Beyond traditional research in wearable robotics, this work focuses on the creation of symbiotic combinations of powered, increasingly intelligent devices that work intimately with human's physical abilities to augment and extend their skills and task performance.
Stage of Development - Prototype
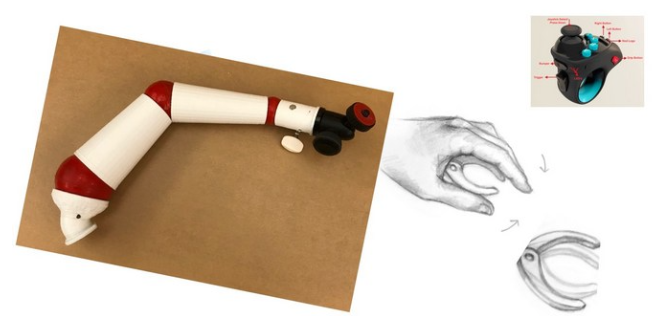
Third Arm - Next generation arm and user interface
Applications
- Augment productivity of abled users. Examples include:
- People holding objects such as flashlights, drinks, plates, or personal care items while performing other two handed tasks
- Construction workers holding more tools to work faster
- Combat forces holding ammunition and other apparatus
- Assist disabled users. Examples include:
- Elderly persons with reduced motor function using device to stabilize or hold objects
- People with limited motor ability execute daily tasks
- Haptic interface for remote robotics systems and AR/VR experiences
- A smart physical assistant that performs actions in response to human requests, including those given by keyboard, myoelectric, verbal, gaze and other methods
Advantages
- Enhances human task productivity
- Provides user an additional means of grasping or supporting objects
- Fail safe patented 4-state brake mechanism maintains holding position without continuous application of power and can toggle this useful state independently in either direction
- Symbiotic combinations of powered, increasingly intelligent devices that work intimately with human's physical abilities to augment and extend their skills and task performance
Publications
- Salisbury Jr, J. K., Lowe, P. G., & Epps, A. D. (2021). U.S. Patent No. 10,941,821. Washington, DC: U.S. Patent and Trademark Office.
Related Links
Patents
- Published Application: 20190360538
- Issued: 10,941,821 (USA)
Similar Technologies
-
Micro-robots capable of towing 2000x its weight using dry adhesive S14-435Micro-robots capable of towing 2000x its weight using dry adhesive
-
Gripper device using shear-controlled dry adhesive film S14-443Gripper device using shear-controlled dry adhesive film
-
Macro-Mini Actuation of Pneumatic Pouches for Soft Wearable Haptic Displays S20-485Macro-Mini Actuation of Pneumatic Pouches for Soft Wearable Haptic Displays