Docket #: S17-093
Flexible Three-axis Capacitive Static and Dynamic Tactile Sensor
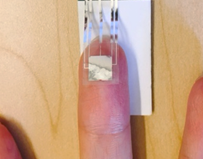
Researchers in Professor Zhenan Bao's group at Stanford University have developed capacitive tactile sensors used to detect static and dynamic forces with varying magnitudes and directions. Common pressure sensors only measure one contact force which limits tactile sensing in robots. However, the circuitry in these improved sensors are specially configured to classify forces in a three-dimensional axis thereby effectively defining both the magnitude of the force and the direction of the force whether they be static or dynamic. The sensors are also created on flexible substrates for applications on curved surfaces, such as the human skin or a robotic hand, increasing the efficiency for dexterous robotic applications.
Applications
- Pressure Sensors
- Tactile Sensors
- Artificial Skin for use on prosthetic limbs or robots
- Biomedical Use
- Touch Sensors
Advantages
- Distinguish forces in three-dimensional axis
- Measure both static and dynamic forces
- Flexible
- Skin-like
Patents
- Published Application: 20200141818
- Issued: 11,860,048 (USA)
Similar Technologies
-
A biomimetic electronic skin (e-skin) with discriminating forces S18-419A biomimetic electronic skin (e-skin) with discriminating forces
-
BodyNET: Sensor System for wearable electronics S17-441BodyNET: Sensor System for wearable electronics
-
Stretchable multi-sensor tag for wearable electronics S19-292Stretchable multi-sensor tag for wearable electronics