Docket #: S21-368
Game-Theoretic Planning for Autonomous Driving among Risk-Aware Human Drivers
Stanford researchers in the Multi-Robot Systems Lab have developed a software model for predicting risk-aware human behavior in multi-agent traffic scenarios that include a range of human driver behavior from aggressive (speeding, overtaking, sudden zigzagging, and lane-changes) to conservative (driving slowly and conforming to the right-most lane). Existing autonomous driving approaches plan conservatively and forgo game-theoretic reasoning. In contrast, the human driver behavior model, CMetric, maps drivers' entropic risk preferences. The game-theoretic risk-sensitive planner uses the risk preference to model risk-aware interactions among human drivers and an autonomous vehicle in various traffic scenarios. (See Figure 1.) This planner recognizes aggressive human drivers and yields to them while maintaining a greater distance from them. The CMetric integrated planner systematically includes uncertainty, leads to safer navigation, and leverages the autonomous vehicles' influence on other cars to achieve safe and efficient driving.
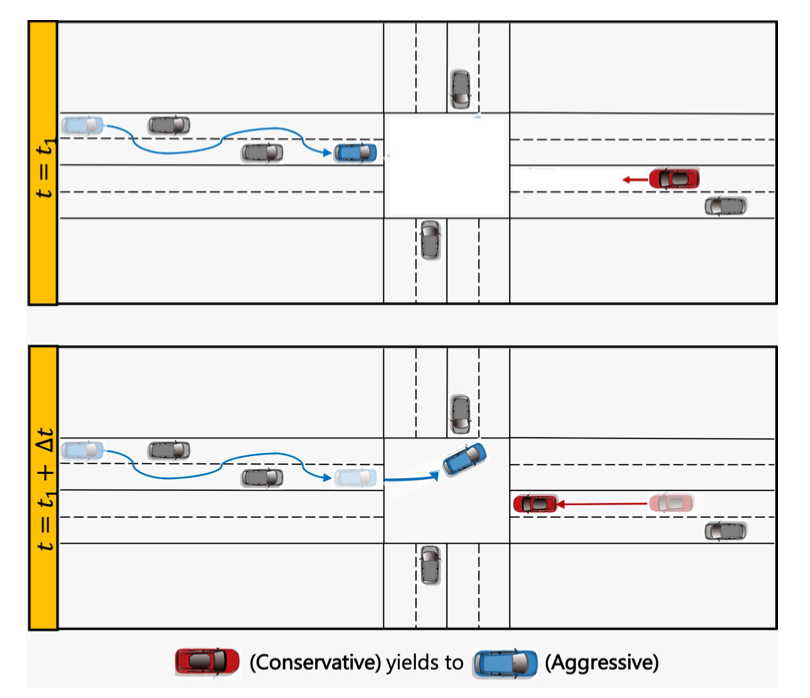
Figure 1: (top) The aggressive human agent (blue) with the ego-vehicle as a conservative agent (red). (bottom) The model determines human agent risk sensitivity and generates a game theory based optimal and safe risk-aware trajectory for the red agent where the red agent yields to the blue human driver allowing it to cross first. (Figure courtesy Multi-Robot Systems Lab.)
Stage of Development – Computer Model
Researchers have tested the method via an open-loop simulation. Future work includes a more realistic closed-loop simulation that combines human behavior model and the risk-aware trajectory planner. Research is ongoing.
Applications
- Autonomous vehicles
Advantages
- Safer navigation than existing methods
- Risk-aware planner recognizes aggressive driving, and yields to them while maintained a greater following distance
Publications
- R. Chandra, M. Wang, M. Schwager, and D. Manocha, (2022). Game-Theoretic Planning for Autonomous Driving among Risk-Aware Human Drivers. Under Review IEEE.
- R. Chandra, D. Manocha, M. Wang, and M. Schwager, (2022) Game-Theoretic Planning for Autonomous Driving among Risk-Aware Human Drivers. U.S. Pat. App. No. 63/251,359.
Related Links
Similar Technologies
-
Anticipatory Steering Wheel Movement for Automated Vehicles S16-370Anticipatory Steering Wheel Movement for Automated Vehicles
-
Disentangling Human Dynamics for Pedestrian Locomotion Forecasting with Noisy Supervision S19-276Disentangling Human Dynamics for Pedestrian Locomotion Forecasting with Noisy Supervision
-
Adaptive Steering Control S08-080Adaptive Steering Control