Docket #: S16-327
Improved surgical navigation for robotic endoscopes and catheters
Stanford researchers developed a method that estimates the position of a robotic surgical catheter for precise control. Data from the catheter's distal tip sensor are used to estimate the real time orientation and position of the base of the catheter's articulating region – giving surgeons more precise control during surgical navigation. Testing-task space control in a mock bronchoscopy showed a significant improvement over model-less and model-based control strategies. The method applies to minimally invasive procedures using robotic endoscopes and catheters. It is especially helpful in complex areas like the lungs and heart. More precise robotic control can reduce procedure variability and improve patient outcomes.
Stage of Research
Researchers tested two rotation estimation models, a static model, and model-less control using an anatomically accurate silicone lung phantom. The rotation estimation method (R?) used measured tip orientation while rotation estimation method (R?x) used measured tip displacement. Both estimation methods complete the full trajectory by successfully estimating base rotation. Model–less control (MLC) reaches three way points before the robot steers into to the lung wall resulting in the manual termination of the run. The static model based control (MBC) run reaches only two way points and drives into the wrong branch before termination. Via rotation estimation methods, feedback control successfully navigates farther into the lung phantom than static model-based control and model-less control.
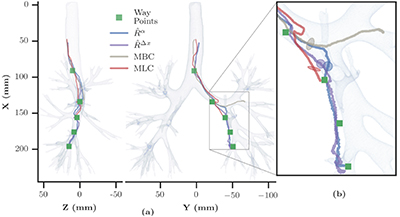
Feedback control in phantom lung navigation - (a) position traces of the distal tip of the robot for each of the control methods. (b) 3x magnification of the left inferior lobe.
Applications
- Minimally invasive procedures using robotic endoscopes and catheters (e.g. bronchoscopies, colonoscopies, cardiac ablations, cranial aneurisms, etc.)
Advantages
- More accurate positioning - especially in more complicated areas like lungs and heart
- Reduces procedure variability (between physicians)
- Algorithm can improve procedure outcome and fine motor control in robots performing catheter positioning
Publications
- Sganga J, Camarillo D, “Orientation Estimation of a Continuum Manipulator in a Phantom Lung.” 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, May 2017.
Related Links
Patents
- Published Application: 20180125591
- Issued: 10,603,124 (USA)
Similar Technologies
-
Model-less method for controlling continuum and redundant robots S13-079Model-less method for controlling continuum and redundant robots
-
Position/force control of a flexible robot under model-less control S14-387Position/force control of a flexible robot under model-less control
-
Neuro-navigation device for localization of internal anatomical regions S17-412Neuro-navigation device for localization of internal anatomical regions