Docket #: S13-079
Model-less method for controlling continuum and redundant robots
Stanford researchers in the CamLab have patented a robust, task-space closed-loop controller for continuum manipulators that can be used in constrained environments and does not rely on a model. Using an optimal control strategy on a tendon-driven robot, this "model-less" method allows the manipulator to interact with several constrained environments in a stable manner. (See images below.) This method can control endo-cavitational tools such as robotic endoscopes and catheters. It is believed that this is the first work in controlling continuum manipulators without using a model.
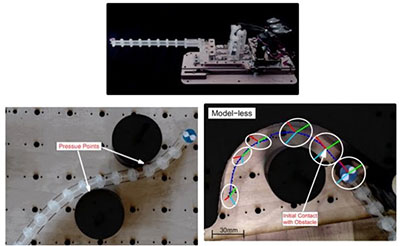
(Images courtesy the CamLab)
Stage of Development - Prototype
CamLab researchers applied the method for robotic catheterization to treat cardiac arrhythmia, and to improve cardiac catheter ablation usability and safety through robotic control. The lab continues investigating new control methods, medical image guidance, and automation for robotic catheter procedures and lung cancer biopsies.
Applications
- Surgical interventions - Medical catheter robots
- Flexible arm manipulators
- Endoscopic robots
- Flexible camera robots
Advantages
- "Model-less" - does not require the use of a model of the robot
- Uses convex optimization to control a robot's position when in contact with obstacles and constraints
- This method allows the control of a flexible robot without modelling either the manipulator nor the environment, significantly simplifying control, and avoiding the need to model complex contact mechanics
- This method does not require sensing of the flexible body conformation, nor does it require environmental sensing
- This method works in body environments where it can be constrained in complex deformations, where any other model-based control method would have great difficulty in performing stable control
- The robot is allowed to extend past its workspace singularity
- Novel - This method has not been used previously for continuum robotics
Publications
- Yip, M. C., Wang, P. J., & Camarillo, D. B. (2014) Model-less Control of a Flexible Robotic Catheter. IEEE International Conference on Robotics and Automation.
- Yip, M. C., & Camarillo, D. B. (2016). Model-less hybrid position/force control: a minimalist approach for continuum manipulators in unknown, constrained environments. IEEE Robotics and Automation Letters, 1(2), 844-851.
- Yip, M. C., & Camarillo, D. B. (2014). Model-less feedback control of continuum manipulators in constrained environments. IEEE Transactions on Robotics, 30(4), 880-889.
- Yip, M., & Camarillo, D. B. (2016). U.S. Patent No. 9,488,971. Washington, DC: U.S. Patent and Trademark Office.
Related Links
Patents
- Published Application: 20140257569
- Issued: 9,488,971 (USA)
Similar Technologies
-
Improved surgical navigation for robotic endoscopes and catheters S16-327Improved surgical navigation for robotic endoscopes and catheters
-
Deep learning model for 3D computed tomography (CT) image reconstruction with single or a few views S18-464Deep learning model for 3D computed tomography (CT) image reconstruction with single or a few views
-
Compact, Parallel, High-Fidelity 7-DOF Haptic Device S19-193Compact, Parallel, High-Fidelity 7-DOF Haptic Device