Docket #: S16-311
Precise, High-Dynamic Range, Miniature Testbed for Satellite Navigation
Researchers in Prof. Simone D'Amico's Space Rendezvous Laboratory have developed a high fidelity, high dynamic range testbed to stimulate a broad range of cameras and verify functionality and performance for the next generation of vision-based satellite navigation systems. In contrast to other equipment, the testbed applies a system of movable lenses and displays to enable short-range and far-range image simulation, dynamic transitions between navigation regimes, and treatment of varied camera fields of view. Whereas other test equipment with a dynamic space scene may have relatively coarse accuracy by comparison, the testbed demonstrates geometric and radiometric calibration down to arcsecond accuracy. This enables static and dynamic real-time testing prior to flight, accounting for rapidly changing scenarios and geometric distortion. This portable, cost-effective, easy-to-calibrate system can be used on the ground to rapidly validate the performance of hardware, software and algorithms, with excellent application to the verification and validation of star tracker hardware and algorithms.
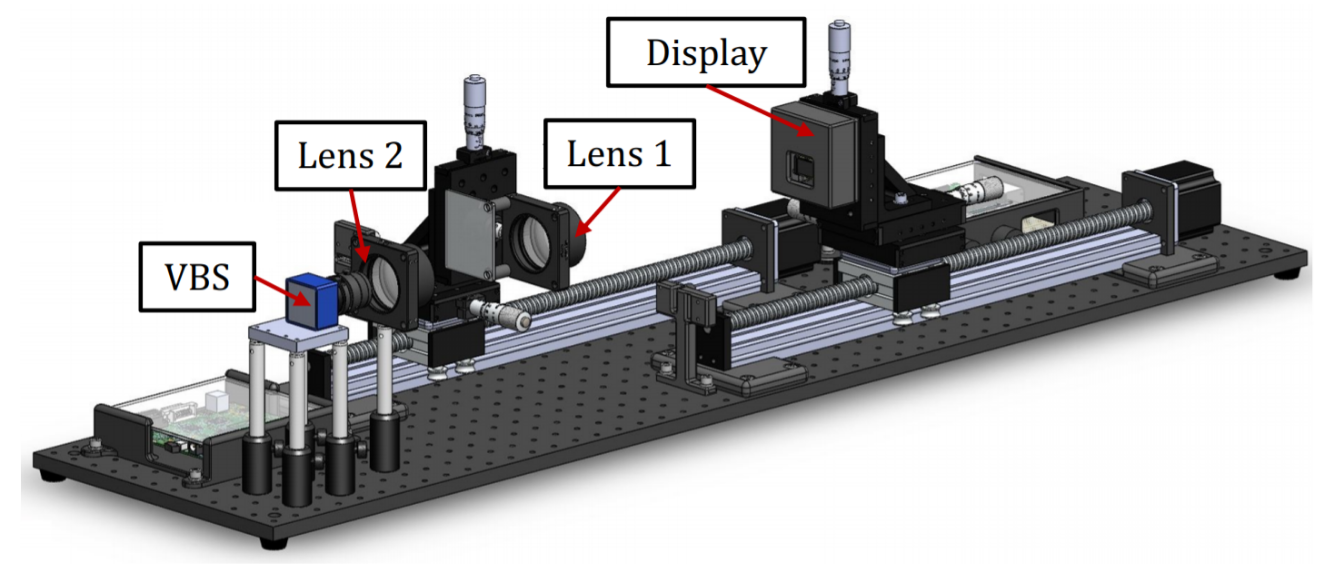
Figure 1: Computer-aided design drawing of the testbed.
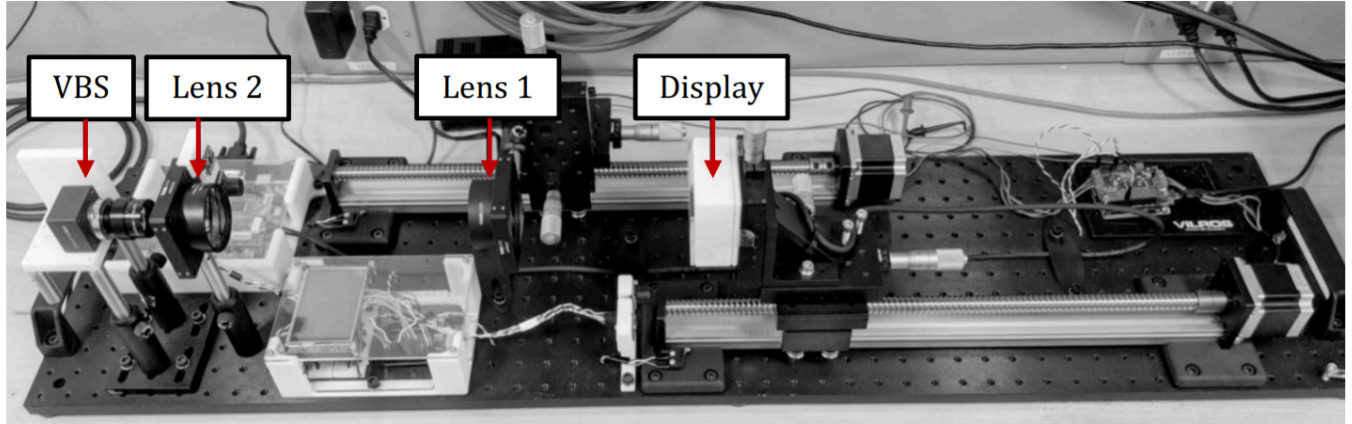
Figure 2: Physical realization of the testbed.
Stage of Research
The inventors have built an upgraded, expanded prototype testbed and have demonstrated operating modes to simulate static and dynamic scenes consisting of stellar and non-stellar objects. The fully calibrated system is capable of positioning point sources of light to within single arcseconds of angular accuracy, spanning eight orders of radiometric magnitude. The testbed has been used to verify and calibrate commercial spacecraft camera hardware. It has also been applied for high-fidelity testing of novel optical navigation algorithms at both close-range and far-range, using cameras in the loop.
Published results include:
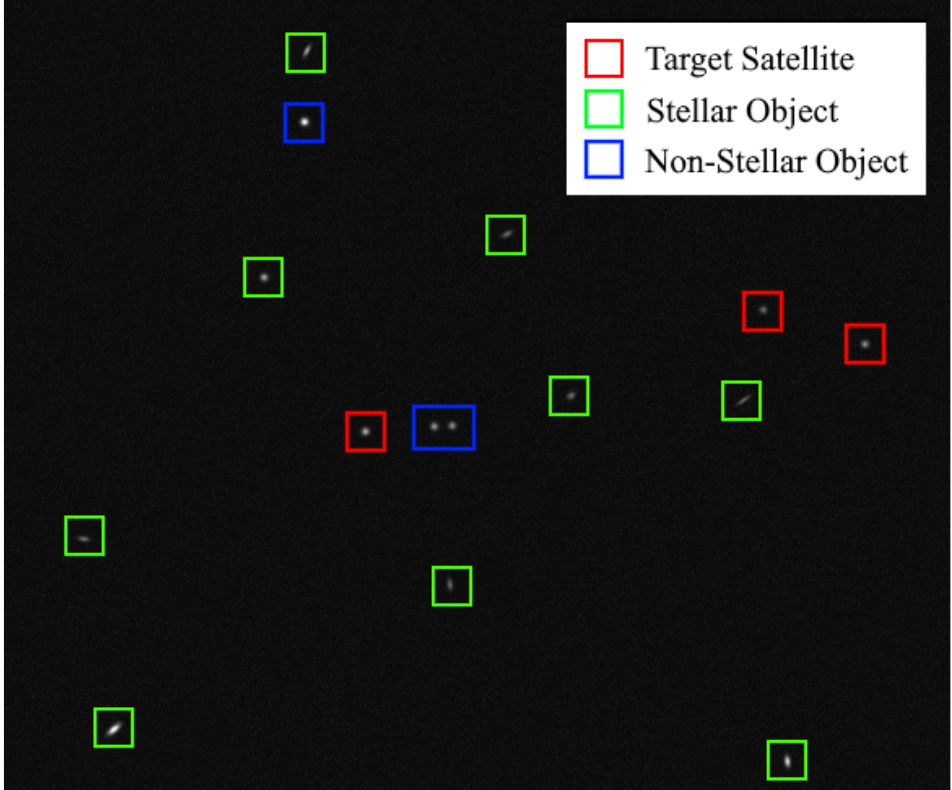
Figure 3: Testbed image for far-range navigation.
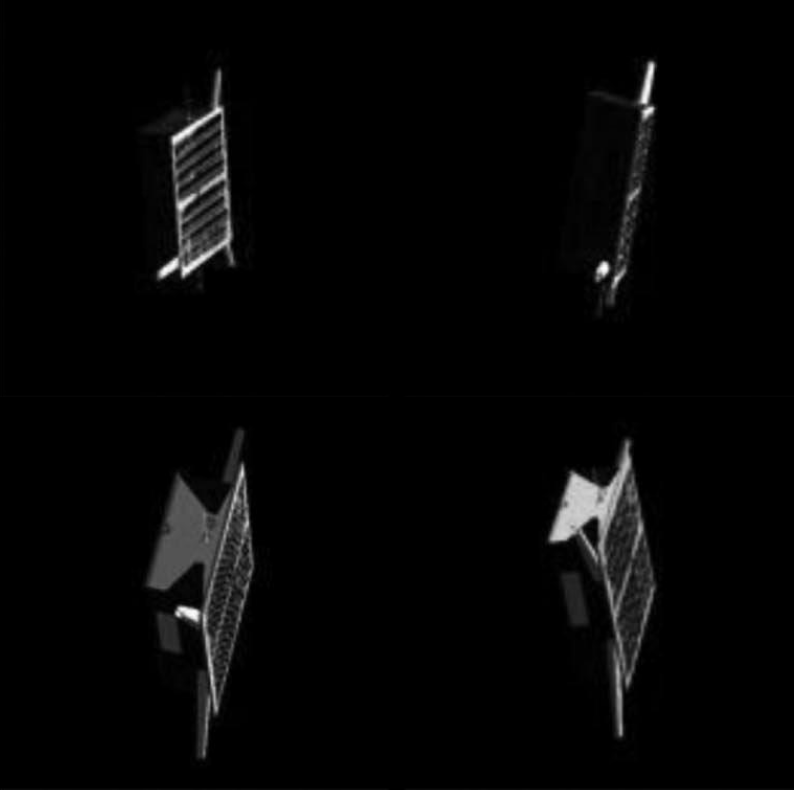
Figure 4: Testbed images for close-range navigation..
Applications
- Satellite navigation algorithm testing – verifies and validates the functionality and performance of algorithms for vision-based navigation in space, including use of cameras and star trackers for: inertial attitude estimation with respect to stars, resident space object detection and tracking, satellite swarming and formation flying, autonomous spacecraft docking and rendezvous, and navigation with respect to planets, moons, asteroids, and near-Earth objects.
- Satellite navigation hardware testing – pre-flight calibration of satellite camera properties and verification of satellite camera performance.
Advantages
- High fidelity - precisely calibrated, geometrically and radiometrically to sub-arcseconds accuracy
- High-dynamic range - spanning eight orders of radiometric magnitude, from stellar objects to nearby resident space objects.
- Variable magnification - movable lenses and displays facilitate the stimulation of cameras with varied fields of view in changing operational regimes.
- Broad compatibility with a range of different camera types.
- Miniature and portable
- Real-time, closed-loop system
- User-friendly calibration
- Modular design - 3D-printed structure that facilitates inter-component separation, alignment, orientation and interchangeability.
Publications
- C. Beierle, J. Sullivan and S. D'Amico, "Design and Utilization of the Stanford Vision-Based Navigation Testbed for Spacecraft Rendezvous,"IWSCFF (2017).
- C. Beierle, J. Sullivan and S. D'Amico, "High-Fidelity Verification of Vision-Based Sensors for Inertial and Far-Range Spaceborne Navigation," ISSFD (2017).
- C. Beierle, "High Fidelity Validation of Vision-Based Sensors and Algorithms for Spaceborne Navigation" , Stanford University, PhD Thesis (2019).
- C. Beierle and S. D'Amico, "Variable Magnification Optical Stimulator for Training and Validation of Spaceborne Vision-Based Navigation," Journal of Spacecraft and Rockets (2019).
- J. Kruger and S. D'Amico, "Autonomous Angles-Only Multi-Target Tracking for Spacecraft Swarms," AAS/AIAA Astrodynamics Specialist Conference (2020).
- J. Sullivan, "Nonlinear Angles-Only Orbit Estimation for Autonomous Distributed Space Systems," Stanford University, PhD Thesis (2020).
- A. W. Koenig, J. Kruger, J. Sullivan and S. D'Amico, "ARTMS: Enabling Autonomous Distributed Angles-Only Orbit Estimation for Spacecraft Swarms," American Control Conference (2021).
- J. Kruger and S. D'Amico, "Autonomous Multi-Observer Angles-Only Navigation for Spacecraft Swarms around Planetary Bodies," IEEE Aerospace Conference (2021).
Related Links
Similar Technologies
-
Atom interferometer for high precision navigation and gravity sensing S13-118Atom interferometer for high precision navigation and gravity sensing
-
Magnetically Actuated Photonic Crystal Sensor S10-227Magnetically Actuated Photonic Crystal Sensor
-
No-switching AC magnetic Hall-effect measurement method S19-035No-switching AC magnetic Hall-effect measurement method