Docket #: S16-273
Small, Robust, Highly-Sensitive Six-Degree of Freedom Capacitive Force/Torque Sensor
Stanford researchers in the Biomimetics and Dexterous Manipulation Lab have patented a low cost, high performance multi-axis capacitive tactile sensor that measures all six components of force and torque. The system consists of a transducer with various high-speed digital data output options (SPI, I2C, UART). The sensor is dynamic (up to 100Hz), highly sensitive, robust, and easily customizable, in both force range and form factor (from large tactile arrays to ultra-thin FPCB), to suit a wide range of applications including robotics, automation, medical, consumer products, and wireless force sensing. The sensor can be used either a stand-alone force/torque sensor or integrated into existing hardware for closed-loop feedback control applications.
Figure
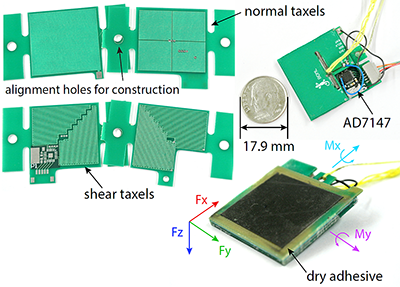
Sensor Prototype: 3-axis, 6 DOF capacitive tactile sensor and decoupled normal/shear force sensing
Image courtesy of the Biomimetics and Dexterous Manipulation Lab
Stage of Development - Prototype
Researchers in the Biomimetics and Dexterous Manipulation Lab at Stanford have successfully tested the prototype against a commercial ATI Gamma Force/Torque Load Cell.
Applications
- Real-time portable force control/torque sensing
- Robotic assembly/manipulation
- Human safe robotics
- Haptic feedback
- Automotive part testing
- Prosthetic device testing
- User Input/Interfaces
Advantages
- Low cost
- Robust
- Easily to manufacture
- Scalable design
- Ultra-thin, light-weight form factor
- Tunable, wide measurement range
- Highly overloadable
- Easy integration into existing systems
- Wireless force sensing possible
Publications
- Wu, X. A., Ulmen, J. V., & Cutkosky, M. R. (2019). U.S. Patent No. 10,267,690. Washington, DC: U.S. Patent and Trademark Office.
Patents
- Published Application: 20180073942
- Issued: 10,267,690 (USA)
Similar Technologies
-
Tactile Gesture Interpretation for Safe Human-Robot Handovers S20-470Tactile Gesture Interpretation for Safe Human-Robot Handovers
-
Flexible Three-axis Capacitive Static and Dynamic Tactile Sensor S17-093Flexible Three-axis Capacitive Static and Dynamic Tactile Sensor
-
A bio-inspired stretchable membrane-based compliance sensor S19-198A bio-inspired stretchable membrane-based compliance sensor