Docket #: S17-149
Cable-controlled robotic joint
Stanford inventors have developed a mechanical differential that is cable-actuated for controlling a 2 degree-of-freedom (DoF) of mobility in a robotic joint. Unlike traditional actuation-transmissions apparatuses, this method utilizes a novel 3-cable tension actuation scheme that minimizes the number of cables required to actuate a two DoF differential mechanism such as a robotic wrist. This is an example of an N+1 actuation system where N+1 tension elements are used to actuate an N bi-directional axes of motion. The design allows all tendons to be pulled at once to variably tighten the system without inducing torques on the differential output. (This is known as the "homogeneous" solution to the force transform.) This extra DoF can be used to minimize the loads on the differential bearings when needed and conversely can be used to increase the bearing loads to increase friction or compliance. The design enables improved actuation of a two DoF joint such as differential. It has applications in general mechanism use, including robotics, prosthetics, surgery, teleoperation, etc.
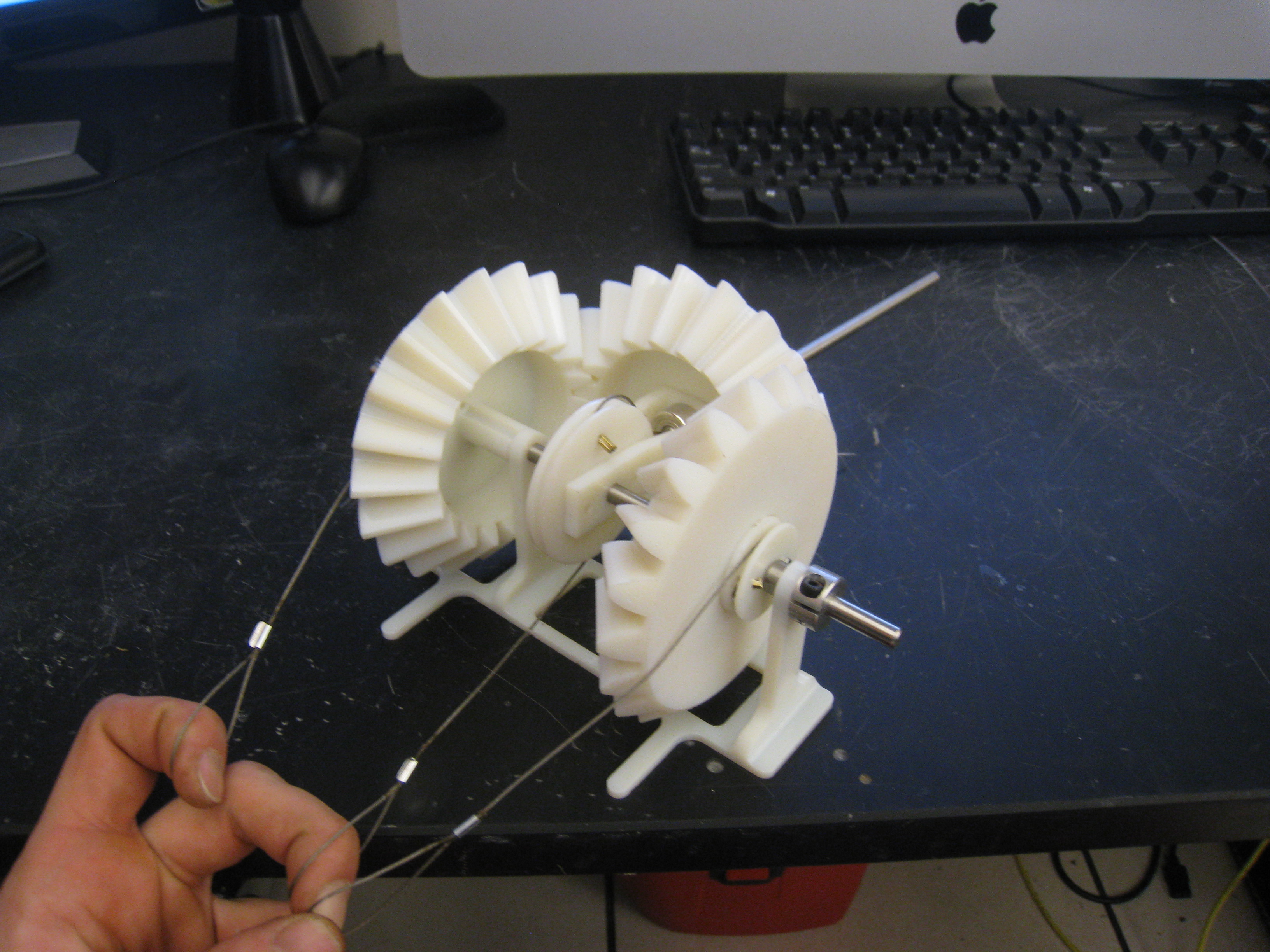
Image description: Prototype of the joint. Photo credit: Inventors
Stage of Research
Prototype
Applications
- Robotics
- Teleoperation
Advantages
- N+1 actuation method enables the use of a minimal number of cables
- Coactivation of cables enables active minimization of bearing loads
- Can be used with two identical joints and no motors
Related Links
Patents
- Published Application: 20200047332
- Issued: 11,951,619 (USA)
Similar Technologies
-
New 'Soft' Robot: Shape-Changing and Versatile S19-299New 'Soft' Robot: Shape-Changing and Versatile
-
Micro-robots capable of towing 2000x its weight using dry adhesive S14-435Micro-robots capable of towing 2000x its weight using dry adhesive
-
Gripper device using shear-controlled dry adhesive film S14-443Gripper device using shear-controlled dry adhesive film