Docket #: S20-531
Resonant Scanning Design and Control for Fast Spatial Sampling
Despite their compact form factor and low power consumption, resonant scanners have not been widely applied to LiDAR due to their scanning trajectory. Here, Stanford researchers have developed a design rule for balancing sample efficiency and sampling range to obtain optimized scanning patterns. Recent studies have shown that focusing on Regions-of-Interest (RoI) with resonant scanning help meet necessary data processing requirements. This system allows for defined RoIs while using both single and multiple frequency scanning patterns and wide-band phase control to acquire the necessary data. Combined, this leads to a more efficient spatial information sampling with high frame rates of ~100 Hz, making it ideal for LiDAR and other 3D computer vision applications including robotics, navigation and augmented reality.
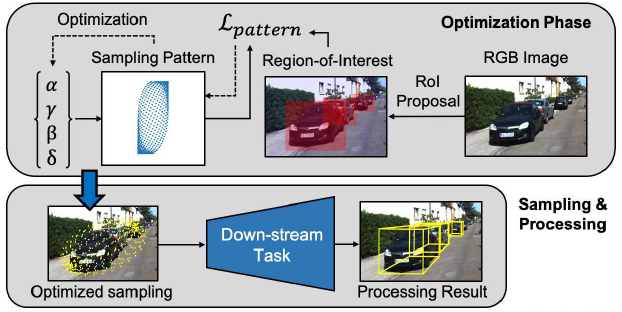
Photo description: Schematic pipeline of the optimization framework using 3D object detection as an example target task. Credit: Sun et al. arXiv (2021).
Stage of Research
Applications
- LiDAR systems, especially in mobile devices such as robotics, navigation, and AR/VR glasses
- 3D imaging modules
Advantages
- Better form factor, field-of-view, and power consumption vs. raster scanners
- Adaptive regions-of-interest sampling
- Multi-frequency scanning control
Publications
- Sun, Zhanghao, Ronald Quan, and Olav Solgaard. Resonant Scanning Design and Control for Fast Spatial Sampling. arXiv preprint arXiv:2103.12996 (2021).
Similar Technologies
-
MEMS phased array for high-speed, random access variable focusing and control for LIDAR and 3D imaging S18-327MEMS phased array for high-speed, random access variable focusing and control for LIDAR and 3D imaging
-
Wolverine: A Wearable Haptic Interface for Grasping in Virtual Reality S16-176Wolverine: A Wearable Haptic Interface for Grasping in Virtual Reality
-
Low-Power CMOS Image Sensor for Object Detection S13-419Low-Power CMOS Image Sensor for Object Detection